Celem realizacji projektu było stworzenie systemu kontroli prawidłowej ścieżki primera na szybie oraz ścieżki kleju na komponencie, który na szybę jest klejony. Kontrola jest realizowana przez dwukamerowy system wizyjny oparty o oprogramowanie Sherlock.

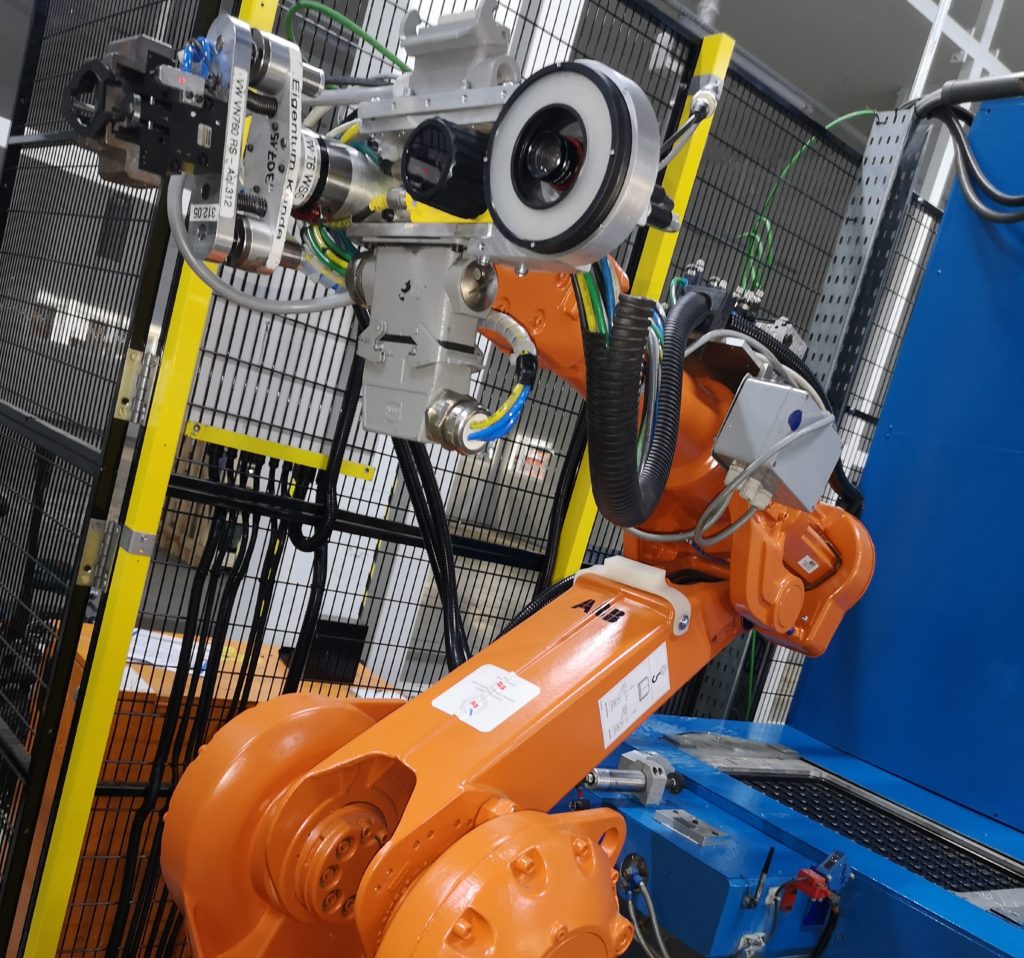
Na stanowisku zrobotyzowanym zostały zaimplementowane dwie kamery 5MPix. Pierwsza kamera monochromatyczna BVS002M zainstalowana jest w ciemni stojacej na przygotowanej wcześniej konstrukcji, druga kolorowa BVS002N zainstalowana jest na chwytaku robota. Ciemnia została wyposażona w oświetlacze UV natomiast na chwytaku robota wraz z kamerą zainstalowano oświetlacz pierścieniowy czerwony z dyfuzorem. Kamera zainstalowana na chwytaku robota sprawdza ścieżkę primera a kamera w ciemni ścieżkę kleju.
Dostęp do ustawień programu kontrolnego, podgląd rezultatów
Rezultaty kontroli oraz dostęp do edycji parametrów programu inspekcyjnego możliwy jest z poziomu oprogramowania Sherlock zainstalowanego na komputerze systemu wizyjnego.
Jakiekolwiek modyfikacje w programie inspekcyjnym mogą być wykonywane jedynie przez wykwalifikowany personel, Balluff nie ponosi odpowiedzialności za skutki samodzielnie wprowadzonych zmian przez Użytkowników.
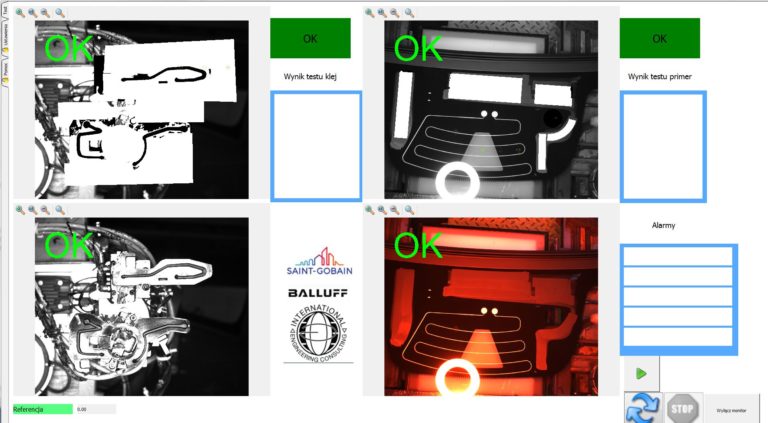
Dla standardowych Użytkowników przygotowany został specjalny Panel Operatorski prezentujący rezultaty kontroli oraz umożliwiający po wprowadzeniu hasła zalogowaanie danego Operatora. Panel Operatorski należy włączyć naciskając odpowiednią ikonę zlokalizowaną na pulpicie systemu Windows.
Panel operatorski systemu wizyjnego
Przygotowany system wizyjny prezentuje rezultaty kontroli na monitorze zainstalowanym na stanowisku montażowym. Panel operatora umożliwia zalogowanie, po zalogowaniu możliwe jest wprowadzanie korekt do programu.